Mesh Deformation Transfer
本文最后更新于:3 个月前
Deformation Transfer For Triangle Mesh
概述
问题描述
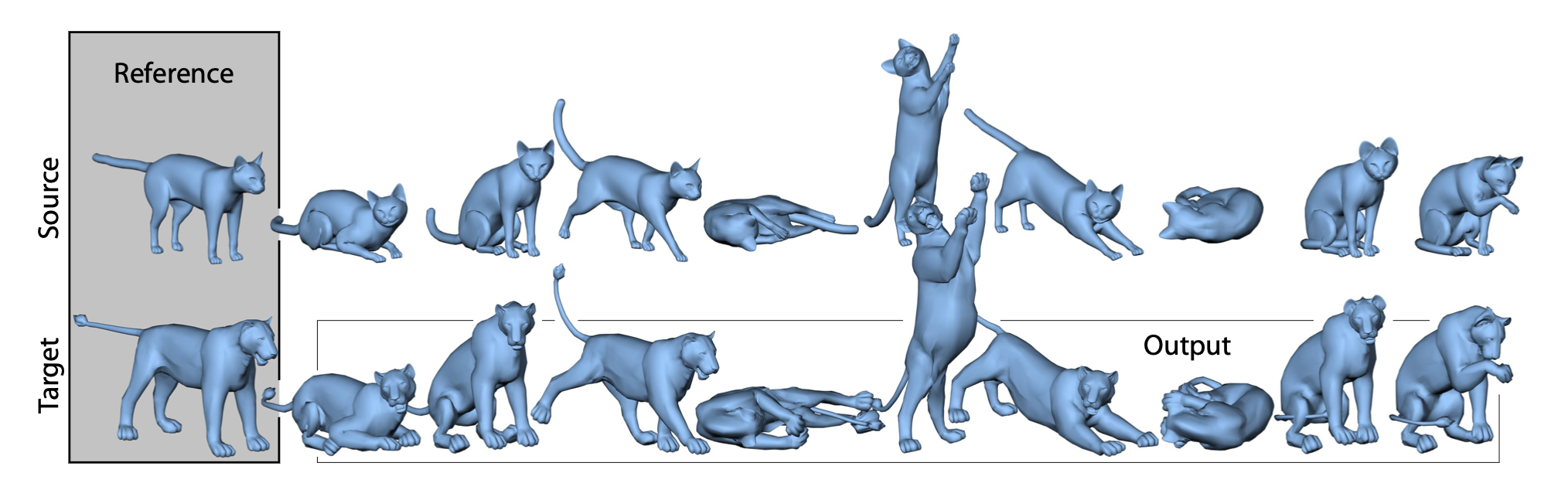
对于两个具有一定视觉相似度的三角网格:原网格 \(S_0\) 和目标网格 \(T_0\),根据原网格已知的变形序列 \(\mathcal S=\{S_0,\,\dots,\, S_{|\mathcal S|}\}\),生成目标网格的对应的变形序列\(\mathcal T=\{T_0,\, \dots, T_{|\mathcal S|}\}\)。
问题假设
- \(\mathcal S\) 和 \(\mathcal T\) 中的网格分别具有相同的拓扑结构,但两个集合对应网格之间不要求。
- \(S_0\) 与 \(T_0\) 应当具有一定的视觉相似度,并且相关点对通过人为标记的方式体现。
基本思想
- 根据人为标定的标记点,计算由 \(S_0\) 到 \(T_0\) 的三角面片对应关系 \(M=\{(s_0,\,t_0),\, \dots,\,(s_{\lvert M\rvert},\, t_{\lvert M\rvert})\}\)。
- 对 \(S_i,\, i\in \{1,\, \dots ,\, |\mathcal S|\}\) ,由于 \(S_i\) 与 \(S_0\) 具有相同的拓扑,可以根据对应关系\(M\),将\(S_i\)每个三角面的变换作用到\(T_0\),加上一些约束条件,得到变形后的 \(T_i\) 。
三角面变换
在三维空间中,对于三角面\(F_i = \left[v_0,\, v_1,\, v_2\right]\) 到另一个三角面\(\widetilde{F_i} =\left[\widetilde v_0,\, \widetilde v_1,\, \widetilde v_2 \right]\) 的仿射变换可以分解为线型部分\(Q_i\) 和非线性部分 \(\mathbf d_i\)。求解该仿射变换需要用四对点到点的关系,对每个三角面引入第四个点: \[ v_3 = v_0 +(v_1 −v_0) \times (v_2 −v_0) \big / \sqrt{|(v_1 −v_0) \times (v_2 −v_0)|} \]
线性部分\(Q_i = \widetilde V_i {V_i}^{-1}\),其中\(V_i = \left[v_1 - v_0\quad v_2 - v_0 \quad v_3-v_0\right]\)
对应关系计算
根据标定点,将 \(S_0\) 在保持拓扑不变的前提下变形为 \(T_0\)。
根据三角面变换中的定义,将\(S_0\)中每个三角面的第四个点加到顶点序列之后: \[ x = \left(\underbrace{v_0,\, v_1,\, \dots,\, v_{n-1}}_{\text{原始顶点}},\, \underbrace{v_{n},\, \dots,\, v_{n+m-1}}_{\text{新增顶点}} \right) \] 其中\(n\)为\(S_0\)中原始顶点的个数,\(m\)为三角面个数,\(x \in \mathbb R^{3\times (n+m)}\)。
通过改动\(x\),来实现\(S_0\)到\(T_0\)的变形,具体表现为定义损失函数,最小二乘法搜索最优解: \[ \min_{\widetilde x} (w_S E_S,\, w_IE_I,\, w_CE_C) \\\text{约束标记点对中 原网格顶点与目标网格顶点相同} \]
| 损失项 | 表达式 | 备注 |
|---|---|---|
| 平滑性 (smoothness) |
\(E_S(x) = \sum_{Q_i}{ \sum_{Q_j \in \text{adj}(Q_i)}{\lVert Q_i -Q_j\rVert_F^2}}\) | 对每一个三角面,周围三角面的形变应该尽量与之相似 |
| 不变性 (identity) |
\(E_I(x) = \sum_{Q_i}{\lVert Q_i - \mathbf I \rVert_F^2}\) | 每个三角面的形变尽可能小 |
| 最近点损失 | \(E_C(x;\, c_0,\,\dots,\,c_n)=\sum_i{\lVert v_i -c_i\rVert^2_F}\) | 原网格的每个顶点都应该尽可能贴近与目标网格的最近点 |
当\(S_0\)在保持拓扑不变的情况下变形为接近 \(T_0\)后,计算两个网格三角面之间的对应关系\(M\)。
对\(S_0\)中的每个三角面,在\(T_0\)中至少存在一个三角面与之存在最近关系,反之亦然。所以两个网格中三角面的对应关系为多对多,并非映射。
形变迁移
在有原网格与目标网格三角面的对应关系\(M\), 以及原网格 初始网格\(S_0\) 与形变网格\(S_i\) 的每个三角面形变关系后,我们可以直接将\(S_0\) 到\(S_i\)的形变迁移到\(T_0\) 上,得到\(T_i\):
\[ \min_{Q_i+\mathbf d_i} \sum_{j=0}^{ | M | -1} { \lVert \mathbf S_{s_j}- \mathbf T_{t_j}\rVert_F^2} \\ \text{约束 } Q_j\, v_i + \mathbf {d}_j = Q_k \, v_i + \mathbf d_k, \quad \forall i, \forall j,k \in \text{adj}(v_i) \]
这里的\(\mathbf S_{s_j}\)表述为网格\(S_i\)中标号为\(s_j\)的三角形的变换\(Q_{s_j}\),\(T_{t_j}\)同理。
对于实际求解,可以将上述对三角面变换的逼近转换到对顶点变换的逼近。
由于三角面变换逼近时,可能会出现边缘撕裂的情况,所以需要添加三角形的邻域约束。而转用顶点表达时,通过同一网格类型拓扑不变的假设,蕴含了变换后的网格不会出现边缘撕裂。
具体的顶点公式推导在后面。
细节推导
三角面变换
以上描述的优化函数大多都是用三角面的形变表示,而优化目标是顶点序列\(x\),需要进行推导将三角面的形变转换为关于顶点序列 \(x\) 的表达式,即。 \[ Q_i = \widetilde V_i\, {V_i}^{-1} \quad \xrightarrow[]{\text{展开顶点序列 }x} \quad Q_i= x\,\hat{V}_i^{-1} \] 计算展开\(x\) \[ \begin{align*} \underset{3\times 3}{Q_i} &= \widetilde V_i\, {V_i}^{-1} \\[2ex] &= \begin{bmatrix} \widetilde v_1^i - \widetilde v_0^i & \widetilde v_2^i - \widetilde v_0^i & \widetilde v_3^i - \widetilde v_0^i \end{bmatrix} \, {V_i}^{-1} \\[2ex] &= \begin{bmatrix} \widetilde v_1^i & \widetilde v_2^i & \widetilde v_3^i \end{bmatrix}\, {V_i}^{-1} - \begin{bmatrix} \widetilde v_0^i & \widetilde v_0^i & \widetilde v_0^i \end{bmatrix}\, {V_i}^{-1}\\[2ex] &= \begin{bmatrix} \widetilde v_0 & \widetilde v_1 & \dots & \widetilde v_{n+m-1} \end{bmatrix} \begin{bmatrix}&\dots\\0 & 0 & 0\\ & \dots\\1 &0&0\\&\dots&\\0&1&0\\&\dots&\\0&0&1\\&\dots\end{bmatrix} {V_i}^{-1} - \begin{bmatrix} \widetilde v_0 & \widetilde v_1 & \dots & \widetilde v_{n+m-1} \end{bmatrix} \begin{bmatrix}&\dots\\1&1&1\\& \dots\\0&0&0\\&\dots&\\0&0&0\\&\dots&\\0&0&0\\&\dots\end{bmatrix} {V_i}^{-1} \\[2ex] &=\begin{bmatrix} \widetilde v_0 & \widetilde v_1 & \dots & \widetilde v_{n+m-1} \end{bmatrix} \begin{bmatrix}&\dots\\-1&-1&-1\\& \dots\\1&0&0\\&\dots&\\0&1&0\\&\dots&\\0&0&1\\&\dots\end{bmatrix} {V_i}^{-1} \\[2ex] &= x \, \hat{V}_i^{-1} \end{align*} \]
一般的目标函数
对于一般情况,期望在保持原网格拓扑不变的同时满足每个三角面的变形目标\(C_i\),写作: \[ \begin{align*} \sum_{i=0}^{\lvert M \rvert-1}{\big\lVert Q_i -C_i\big\rVert_F^2} &= \sum_{i=0}^{\lvert M \rvert-1}{\big\lVert x\, \hat{V}_i^{-1} - C_i\big\rVert_F^2} \\[2ex] & =\sum_{i=0}^{\lvert M \rvert-1}{ \begin{Vmatrix} \left( x\, \hat{V}_i^{-1} - C_i\right)^T \end{Vmatrix}_F^2 } \\[2ex] &= \sum_{i=0}^{\lvert M \rvert-1}{ \begin{Vmatrix} \left(\hat{V}_i^{-1}\right)^T\, x^T-C_i^T \end{Vmatrix}_F^2 } \\[2ex] &= \begin{Vmatrix} \begin{pmatrix} \left(\hat{V}_0^{-1}\right)^T \\ \left(\hat{V}_1^{-1}\right)^T \\ \dots\\ \left(\hat{V}_{\lvert M \rvert-1}^{-1}\right)^T \end{pmatrix} \,x^T - \begin{pmatrix} C_0^T \\ C_1^T \\ \dots \\ C_{\lvert M \rvert-1}^T \end{pmatrix} \end{Vmatrix} _F^2 \\[2ex] &=\begin{Vmatrix} A\,x^T - b \end{Vmatrix}_F^2 \end{align*} \] 即目标函数变为 \(E (x) = \begin{Vmatrix} A\, x^T - b \end{Vmatrix}_F^2\) 的形式,使用最小二乘法[1],得到 \[ \frac{\partial E(x)}{\partial x} = \frac{\partial {\left( x^TA^TA\,x -2b^TA\,x+b^T\,b\right)} }{\partial x} = 2A^TA\,x - 2A^T b = 0\\[2ex] A^T A\,x = A^T b \]
具体的目标函数
平滑性损失 \[ \begin{align*} E_S(x)&=\sum_{Q_i}{ \sum_{Q_j \in \text{adj}(Q_i)}{\lVert Q_i -Q_j\rVert_F^2}} \\[2ex] &= \begin{Vmatrix} \begin{pmatrix} \left(\hat{V}_0^{-1} - \hat{V}_{j_0}^{-1}\right)^T \\ \left(\hat{V}_0^{-1} - \hat{V}_{j_1}^{-1}\right)^T \\ \dots \\ \left(\hat{V}_0^{-1} - \hat{V}_{j_{\lvert \text{adj}(Q_i) \rvert-1}}^{-1}\right)^T \\ \left(\hat{V}_1^{-1} - \hat{V}_{j_0}^{-1}\right)^T\\ \dots \end{pmatrix} \, x^T - 0 \end{Vmatrix}_F^2 = \begin{Vmatrix} A_S\, x^T - b_S \end{Vmatrix}_F^2 \end{align*} \] 其中\(A_S \in \mathbb R^{3q\times {(n+m)}}\), \(b_S \in \mathbb R^{3q\times 3}\),\(q = \sum_i {\lvert \text{adj}(Q_i)\rvert}\)。
不变性损失 \[ \begin{align*} E_I(x) &= \sum_{Q_i}{\lVert Q_i - \mathbf I \rVert_F^2}\\[2ex] &= \begin{Vmatrix} \begin{pmatrix} \left(\hat{V}_0^{-1}\right)^T \\ \left(\hat{V}_1^{-1}\right)^T \\ \dots\\ \left(\hat{V}_{m-1}^{-1}\right)^T \end{pmatrix} \,x^T - \begin{pmatrix} \mathbf I \\ \mathbf I \\ \dots \\ \mathbf I \end{pmatrix} \end{Vmatrix} = \begin{Vmatrix} A_I\, x^T - b_I \end{Vmatrix}_F^2 \end{align*} \] 其中\(A_I \in \mathbb R^{3m \times (n+m)}\),\(b_I \in \mathbb R^{3m\times 3}\)。
最近点损失 \[ \begin{align*} E_C(x;\, c_0,\,\dots,\,c_n)&=\sum_i{\lVert v_i -c_i\rVert^2} \\[2ex] &=\begin{Vmatrix} \mathbf I\, x^T - \begin{pmatrix} C_0^T \\ C_1^T \\ \dots \\ C_{m+n-1}^T \end{pmatrix} \end{Vmatrix}_F^2 = \begin{Vmatrix}A_C \, x^T -b_C \end{Vmatrix}_F^2 \end{align*} \] 其中\(A_C \in \mathbb R^{3m \times (n+m)}\),\(b_C \in \mathbb R^{3m\times 3}\)。
为了统一使用变量\(x^T\),需要有\(n+m\)个点的形式,但实际上只需要计算前\(n\)个顶点的最近点。
形变迁移损失 \[ \begin{align*} E_Q(x)&=\sum_{j=0}^{\lvert M\rvert -1} {\lVert \mathbf S_{s_j}- \mathbf T_{t_j}\rVert_F^2}\\[2ex] &=\sum_{j=1}^{\lvert M\rvert}{ \begin{Vmatrix} \mathbf S_{s_j}^T - {\hat{V}_{t_j}^{-1}}^T\, x^T \end{Vmatrix}_F^2 } \\[2ex] &= \begin{Vmatrix} -\begin{pmatrix} \left(\hat{V}_{t_0}^{-1}\right)^T \\ \left(\hat{V}_{t_1}^{-1}\right)^T \\ \dots\\ \left(\hat{V}_{t_{\lvert M \rvert-1}}^{-1}\right)^T \end{pmatrix} \, x^T +\begin{pmatrix} \mathbf S_{s_0}^T \\ \mathbf S_{s_1}^T \\ \dots \\ \mathbf S_{s_{\lvert M\rvert -1}}^T \end{pmatrix} \end{Vmatrix}_F^2\\[2ex] &= \begin{Vmatrix} A_Q\, x^T - b_Q \end{Vmatrix}_F^2 \end{align*} \] 其中\(A_Q \in \mathbb R^{3\vert M\rvert \times (n+m)}\),\(b_Q \in \mathbb R^{3\vert M\rvert \times 3}\),\(\lvert M \rvert\)是对应关系中元素的个数,满足\(\lvert M\rvert \ge m\)。
实验
注意事项
对应关系求解: 标记点约束
在求解\(\min_x E_S\)、\(\min_xE_I\)和\(\min_x E_Q\)时,需要约束\(S_0\)和\(T_0\)对应的标记点相同: \[ \begin{align*} A^T\,A\, x^T &= A^T\, b\\[2ex] ({A^u})^T\,A^u\, \left(x^u\right)^T + ({A^m})^T\, A^m\, \left(\widetilde{x}^m\right)^T &= A^T\, b\\[2ex] ({A^u})^T\,A^u\, \left(x^u\right)^T &= A^T\,b - ({A^m})^T\,A^m\, \left(\widetilde{x}^m\right)^T \end{align*} \] 对于\(S_0\),\(A^u\)、\(x^u\)分别为未标记点的系数矩阵以及顶点序列,\(A^m\)、\(x^m\)为已标记点的系数矩阵以及顶点序列,\(\widetilde{x}^m\)为\(T_0\)中已标记点的顶点序列。
再求解出\(x^u\)后再根据约束条件\(x^m = \widetilde{x}^m\) 计算出结果 \(\widetilde{x}\)。
对应关系求解: 目标函数组合与迭代
对应关系计算时,可以将相关目标函数写在一起: \[ \widetilde{x} = \underset{x}{\arg \min} \begin{Vmatrix} \begin{pmatrix} w_SA_S \\ w_IA_I\\ w_CA_C \end{pmatrix} \, x^T - \begin{pmatrix} w_S b_S\\ w_I b_I\\ w_C b_C \end{pmatrix} \end{Vmatrix}_F^2 \] 其中\(w_S=1.0\),\(w_I=0.001\),\(w_C=[0,\,1\, \dots,\, 5000]\)。
稀疏线性方程组求解[2]
- 直接求解
- LU分解:\(Ax=b \Longrightarrow LUx = b\)
- Cholesky分解[3]:\(Ax = b \Longrightarrow L^TLx=b\)
- 间接求解
- Jacobi method / Gauss-Seidel method
优化
- 稀疏矩阵的计算:乘法、转置、切片、拼接和索引。
- 稀疏方程组求解。
- 计算\(E_C\)时,最近点的计算。
- 计算对应关系\(M\)时,最近三角面重心以及法线夹角的计算。
计算流程
计算形变迁移,本质上在优化四个目标函数:\(E_S\)、\(E_I\)、\(E_C\)和\(E_Q\)。其中系数矩阵几乎都包含\(\hat{V}^{-1}\)的计算。