Mesh Deformation Transfer
本文最后更新于:1 年前
Deformation Transfer For Triangle Mesh
概述
问题描述
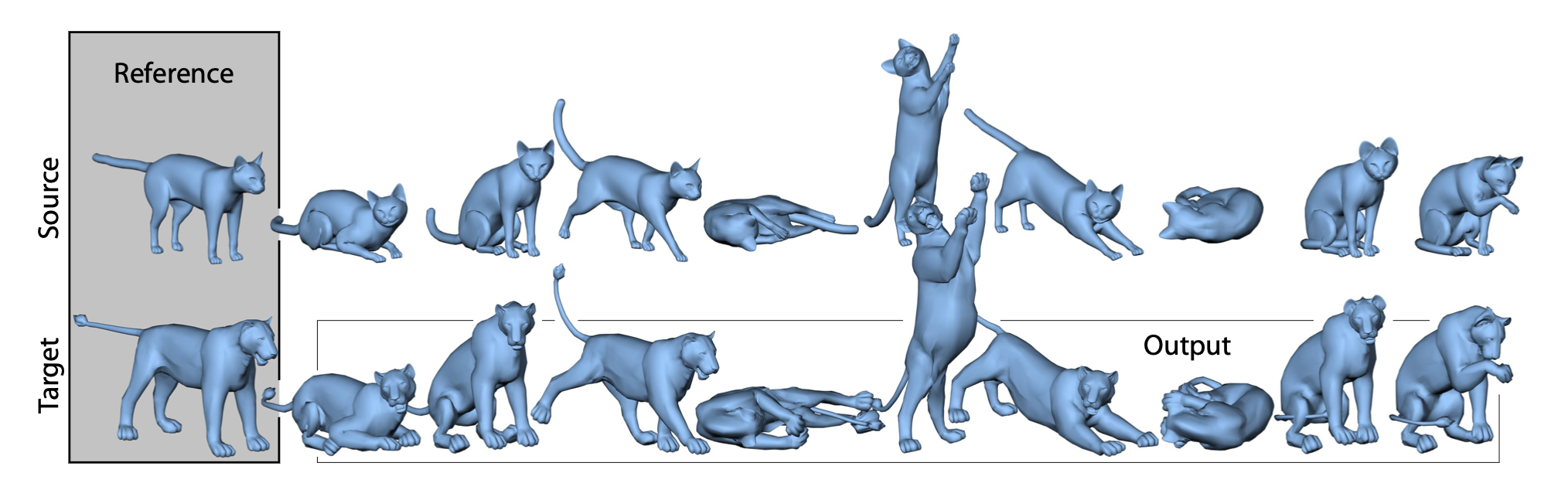
对于两个具有一定视觉相似度的三角网格:原网格 S0 和目标网格 T0,根据原网格已知的变形序列 S={S0,…,S|S|},生成目标网格的对应的变形序列T={T0,…,T|S|}。
问题假设
- S 和 T 中的网格分别具有相同的拓扑结构,但两个集合对应网格之间不要求。
- S0 与 T0 应当具有一定的视觉相似度,并且相关点对通过人为标记的方式体现。
基本思想
- 根据人为标定的标记点,计算由 S0 到 T0 的三角面片对应关系 M={(s0,t0),…,(s|M|,t|M|)}。
- 对 Si,i∈{1,…,|S|} ,由于 Si 与 S0 具有相同的拓扑,可以根据对应关系M,将Si每个三角面的变换作用到T0,加上一些约束条件,得到变形后的 Ti 。
三角面变换
在三维空间中,对于三角面Fi=[v0,v1,v2] 到另一个三角面~Fi=[˜v0,˜v1,˜v2]
的仿射变换可以分解为线型部分Qi
和非线性部分 di。求解该仿射变换需要用四对点到点的关系,对每个三角面引入第四个点:
v3=v0+(v1−v0)×(v2−v0)/√|(v1−v0)×(v2−v0)|
线性部分Qi=˜ViVi−1,其中Vi=[v1−v0v2−v0v3−v0]
对应关系计算
根据标定点,将 S0 在保持拓扑不变的前提下变形为 T0。
根据三角面变换中的定义,将S0中每个三角面的第四个点加到顶点序列之后:
x=(v0,v1,…,vn−1⏟原始顶点,vn,…,vn+m−1⏟新增顶点)
通过改动x,来实现S0到T0的变形,具体表现为定义损失函数,最小二乘法搜索最优解:
min˜x(wSES,wIEI,wCEC)约束标记点对中
原网格顶点与目标网格顶点相同
| 损失项 | 表达式 | 备注 |
|---|---|---|
| 平滑性 (smoothness) |
ES(x)=∑Qi∑Qj∈adj(Qi)‖Qi−Qj‖2F | 对每一个三角面,周围三角面的形变应该尽量与之相似 |
| 不变性 (identity) |
EI(x)=∑Qi‖Qi−I‖2F | 每个三角面的形变尽可能小 |
| 最近点损失 | EC(x;c0,…,cn)=∑i‖vi−ci‖2F | 原网格的每个顶点都应该尽可能贴近与目标网格的最近点 |
当S0在保持拓扑不变的情况下变形为接近 T0后,计算两个网格三角面之间的对应关系M。
对S0中的每个三角面,在T0中至少存在一个三角面与之存在最近关系,反之亦然。所以两个网格中三角面的对应关系为多对多,并非映射。
形变迁移
在有原网格与目标网格三角面的对应关系M, 以及原网格 初始网格S0 与形变网格Si 的每个三角面形变关系后,我们可以直接将S0 到Si的形变迁移到T0 上,得到Ti:
minQi+di|M|−1∑j=0‖Ssj−Ttj‖2F约束 Qjvi+dj=Qkvi+dk,∀i,∀j,k∈adj(vi)
这里的Ssj表述为网格Si中标号为sj的三角形的变换Qsj,Ttj同理。
对于实际求解,可以将上述对三角面变换的逼近转换到对顶点变换的逼近。
由于三角面变换逼近时,可能会出现边缘撕裂的情况,所以需要添加三角形的邻域约束。而转用顶点表达时,通过同一网格类型拓扑不变的假设,蕴含了变换后的网格不会出现边缘撕裂。
具体的顶点公式推导在后面。
细节推导
三角面变换
以上描述的优化函数大多都是用三角面的形变表示,而优化目标是顶点序列x,需要进行推导将三角面的形变转换为关于顶点序列
x 的表达式,即。 Qi=˜ViVi−1展开顶点序列 x→Qi=xˆV−1i
一般的目标函数
对于一般情况,期望在保持原网格拓扑不变的同时满足每个三角面的变形目标Ci,写作: |M|−1∑i=0‖Qi−Ci‖2F=|M|−1∑i=0‖xˆV−1i−Ci‖2F=|M|−1∑i=0‖(xˆV−1i−Ci)T‖2F=|M|−1∑i=0‖(ˆV−1i)TxT−CTi‖2F=‖((ˆV−10)T(ˆV−11)T…(ˆV−1|M|−1)T)xT−(CT0CT1…CT|M|−1)‖2F=‖AxT−b‖2F
具体的目标函数
平滑性损失 ES(x)=∑Qi∑Qj∈adj(Qi)‖Qi−Qj‖2F=‖((ˆV−10−ˆV−1j0)T(ˆV−10−ˆV−1j1)T…(ˆV−10−ˆV−1j|adj(Qi)|−1)T(ˆV−11−ˆV−1j0)T…)xT−0‖2F=‖ASxT−bS‖2F
不变性损失 EI(x)=∑Qi‖Qi−I‖2F=‖((ˆV−10)T(ˆV−11)T…(ˆV−1m−1)T)xT−(II…I)‖=‖AIxT−bI‖2F
最近点损失 EC(x;c0,…,cn)=∑i‖vi−ci‖2=‖IxT−(CT0CT1…CTm+n−1)‖2F=‖ACxT−bC‖2F
为了统一使用变量xT,需要有n+m个点的形式,但实际上只需要计算前n个顶点的最近点。
形变迁移损失 EQ(x)=|M|−1∑j=0‖Ssj−Ttj‖2F=|M|∑j=1‖STsj−ˆV−1tjTxT‖2F=‖−((ˆV−1t0)T(ˆV−1t1)T…(ˆV−1t|M|−1)T)xT+(STs0STs1…STs|M|−1)‖2F=‖AQxT−bQ‖2F
实验
注意事项
对应关系求解: 标记点约束
在求解minxES、minxEI和minxEQ时,需要约束S0和T0对应的标记点相同: ATAxT=ATb(Au)TAu(xu)T+(Am)TAm(˜xm)T=ATb(Au)TAu(xu)T=ATb−(Am)TAm(˜xm)T
再求解出xu后再根据约束条件xm=˜xm 计算出结果 ˜x。
对应关系求解: 目标函数组合与迭代
对应关系计算时,可以将相关目标函数写在一起: ˜x=argminx‖(wSASwIAIwCAC)xT−(wSbSwIbIwCbC)‖2F
稀疏线性方程组求解[2]
- 直接求解
- LU分解:Ax=b⟹LUx=b
- Cholesky分解[3]:Ax=b⟹LTLx=b
- 间接求解
- Jacobi method / Gauss-Seidel method
优化
- 稀疏矩阵的计算:乘法、转置、切片、拼接和索引。
- 稀疏方程组求解。
- 计算EC时,最近点的计算。
- 计算对应关系M时,最近三角面重心以及法线夹角的计算。
计算流程
计算形变迁移,本质上在优化四个目标函数:ES、EI、EC和EQ。其中系数矩阵几乎都包含ˆV−1的计算。